Point Based Registration
Imagine you have collected points
3 points, of anatomical locations, in a CT scan
3 points, of the same anatomical locations, using a tracked pointer
The first 3 points use image co-ordinates, the second set of 3 points use tracker coordinates. In order to use image data in the tracker coordinate system, we must find a transformation that will map between image and tracker coordinates.
[1]:
%matplotlib inline
[2]:
# Jupyter notebook sets the cwd to the folder containing the notebook.
# So, you want to add the root of the project to the sys path, so modules load correctly.
import sys
sys.path.append("../../")
[3]:
# All imports for this notebook
import numpy as np
import matplotlib
import matplotlib.pyplot as plt
# Note that the scikit-surgery libraries provide point-based registration using Arun's method and matrix utilities.
import sksurgerycore.algorithms.procrustes as pbr
import sksurgerycore.transforms.matrix as mu
[4]:
# Define 3 points, as if they were in an image
image_points = np.zeros((3,3))
image_points[0][0] = 0
image_points[0][1] = 0
image_points[0][2] = 0
image_points[1][0] = 10
image_points[1][1] = 0
image_points[1][2] = 0
image_points[2][0] = 0
image_points[2][1] = 10
image_points[2][2] = 0
# Draw them in 2D. Its a triangle.
plt.scatter(image_points[:,0], image_points[:,1])
plt.show()

[5]:
# Define 3 points, as if they were in tracker space
tracker_points = np.zeros((3,3))
tracker_points[0][0] = 5
tracker_points[0][1] = 5
tracker_points[0][2] = -1000
tracker_points[1][0] = 15
tracker_points[1][1] = 5
tracker_points[1][2] = -1000
tracker_points[2][0] = 5
tracker_points[2][1] = 15
tracker_points[2][2] = -1000
# Draw them in 2D. Its a triangle, same point order, different location.
plt.scatter(tracker_points[:,0], tracker_points[:,1])
plt.show()

[17]:
# Compute Transformation from image to tracker
R, t, FRE = pbr.orthogonal_procrustes(tracker_points, image_points)
T = mu.construct_rigid_transformation(R,t)
[18]:
print(R)
print(t)
print(FRE)
print(T)
[[ 1.00000000e+00 -4.26642159e-17 0.00000000e+00]
[ 3.58404070e-17 1.00000000e+00 0.00000000e+00]
[ 0.00000000e+00 0.00000000e+00 1.00000000e+00]]
[[ 5.]
[ 5.]
[-1000.]]
1.4503892858778862e-15
[[ 1.00000000e+00 -4.26642159e-17 0.00000000e+00 5.00000000e+00]
[ 3.58404070e-17 1.00000000e+00 0.00000000e+00 5.00000000e+00]
[ 0.00000000e+00 0.00000000e+00 1.00000000e+00 -1.00000000e+03]
[ 0.00000000e+00 0.00000000e+00 0.00000000e+00 1.00000000e+00]]
[19]:
# Construct inverse
R2, t2, FRE2 = pbr.orthogonal_procrustes(image_points, tracker_points)
T2 = mu.construct_rigid_transformation(R2,t2)
print(np.matmul(T,T2))
[[ 1.00000000e+00 -8.53284318e-17 0.00000000e+00 -2.66453526e-15]
[ 7.16808141e-17 1.00000000e+00 0.00000000e+00 -2.66453526e-15]
[ 0.00000000e+00 0.00000000e+00 1.00000000e+00 9.09494702e-13]
[ 0.00000000e+00 0.00000000e+00 0.00000000e+00 1.00000000e+00]]
[20]:
# Add noise to 1 point, recalculate, look at FRE
image_points[0][0] = 1
R, t, FRE = pbr.orthogonal_procrustes(tracker_points, image_points)
print(FRE)
0.44015551225972854
[30]:
# Transform image points into tracker space
transformed_image_points = np.transpose(np.matmul(R, np.transpose(image_points)) + t)
print(transformed_image_points)
[[ 5.58210085 5.06944883 -1000. ]
[ 14.57914373 4.83875543 -1000. ]
[ 4.83875543 15.09179574 -1000. ]]
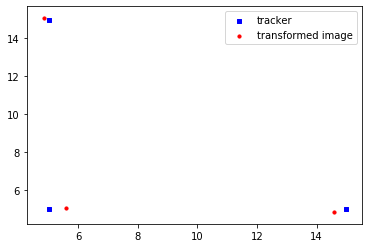
[31]:
# Plot tracker points and transformed image points
fig = plt.figure()
ax1 = fig.add_subplot(111)
ax1.scatter(tracker_points[:,0], tracker_points[:,1], s=10, c='b', marker="s", label='tracker')
ax1.scatter(transformed_image_points[:,0], transformed_image_points[:,1], s=10, c='r', marker="o", label='transformed image')
plt.legend(loc='upper right');
plt.show()
[ ]: