Workshop 1: UCL Skull Phantom, EM Tracker, Windows
Required Software
Assumes you have installed
Note: all command line tools below should be run from the MPHY0026/ directory. Each program will respond to the --help argument to describe available options.
1. Locate 5 fiducials in order in Physical Space
Ensure the tracker is on.
Place the pointer in the first fiducial.
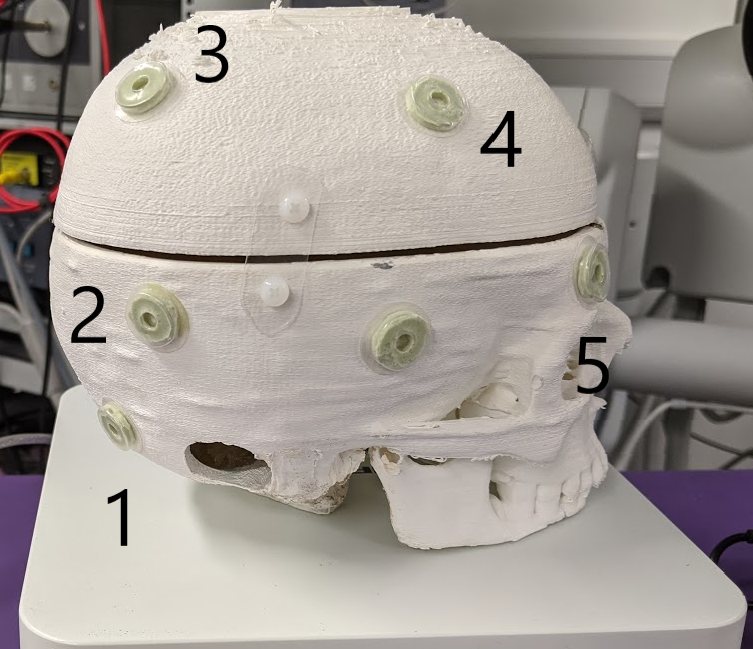
Figure 1: Location of 5 fiducial markers to be used.
Use the command line tool to record the location of the points:
python mphy0026_grab_pointer.py -t aurora -p 0 -o tests/data/skull/em_pointer_offset.txt -f 0.2 -n 5 -d tracker.txt
This will grab a frame every 5 seconds (fps of 0.2), allowing time to move the pointer to each fiducial in turn.
N.B. The Pointer tip offset is at 22.81 2.35 -4.51, and is stored in file tests\data\skull\em-pointer-offset.txt. This has been obtained by pivot calibration, which will be covered in next week’s materials.
2. Register Physical Space to Image Space
The CT fiducial positions are provided in tests\data\skull\ct_fiducials.txt
You can compute a point based registration using Arun’s method:
python mphy0026_registration.py -f tests/data/skull/ct_fiducials.txt -m tracker.txt -o tracker-to-ct-using-PBR.txt
(Note: CT points can be saved for later use. Physical space points cannot. Someone might move the phantom or tracker invbetween runs.)
3. Display Registered CT scan With Pointer
The registration can be used to visualise the CT at the pointer tip:
python mphy0026_quadview.py -t aurora -v tests/data/skull/skull.nii -reg tracker-to-ct-using-PBR.txt -p 0 -o tests/data/skull/em_pointer_offset.txt
4. Grab Data for ICP
The same pointer program can also grab data for surface based registration using ICP. We will grab 900 points at 30 fps from the Aurora tracker.
Assign 1 person to be dragging the pointer.
Place the pointer on the phantom.
Any movement of the phantom during collection will result in larger errors.
Start grabbing data:
python mphy0026_grab_pointer.py -t aurora -p 0 -o tests/data/skull/em_pointer_offset.txt -f 30 -n 900 -d surface.txt
The person dragging the pointer should not lift/remove from the surface, as the tracker will keep tracking.
If the tracker fails to detect the pointer (i.e. pointer is obscured), the output on console will stop, and data collection will stop. The Aurora tracker has a fixed ‘field of view’ around the base station.
Once complete, the file
surface.txtshould contain 900 rows of point data, representing the physical location of the surface.
5. Register ICP data to VTK surface
The program used for point based registration can also do ICP. Once you have collected surface.txt, do:
python mphy0026_registration.py -f tests/data/skull/skull.vtk -m surface.txt -o tracker-to-ct-using-ICP.txt
Look at the residual. Does it look high/low?
You could test the alignment, by re-running the quadviewer program using tracker-to-ct-using-ICP.txt in place of the point-based one.
Its probably bad due to poor initialisation.
So, use the Point-Based Registration to initialise:
python mphy0026_registration.py -f tests/data/skull/skull.vtk -m surface.txt -o tracker-to-ct-using-ICP.txt -i tracker-to-ct-using-PBR.txt
The residual should be much lower, and you can re-run the quad viewer to confirm its registered.
Repeat, using much fewer points?
Repeat, using points from a very flat/boring/planar area of the phantom?
Repeat, manually jittering the pointer up and down, to simulate poor data. When does registration fail?
6. Calculation of TRE
For PBR, this can be achieved by, registering using fewer points (at least 3), and using the remaining point as a target.
For ICP, as the fiducials are not used for registration, these can be used directly.
BUT - you ideally need to measure physical space, using an independent measure, eg. ruler.
If you take a CT fiducial position, and convert to tracker/physical space, and measure the distance from the predicted position to the actual position, you have also included CT FLE.
7. Report Back
Huddle round at end of session.
We want to record, for each group a typical FLE (CT), FLE (Tracker), FRE, TRE (Point-Based), TRE (ICP).
This does not have to be terribly rigorous. Its a learning exercise, so even 1 repetition will do.